
Amplificador de carga CET-DQ601B



Descripción breve:
El amplificador de carga Enviko es un amplificador de carga de canal cuyo voltaje de salida es proporcional a la carga de entrada. Equipado con sensores piezoeléctricos, puede medir la aceleración, la presión, la fuerza y otras magnitudes mecánicas de los objetos.
Se utiliza ampliamente en sectores como la conservación de agua, la energía, la minería, el transporte, la construcción, la industria sísmica, la industria aeroespacial y la armamentística, entre otros. Este instrumento presenta las siguientes características.
Detalle del producto
Descripción general de funciones
CET-DQ601B
El amplificador de carga es un amplificador de carga de canal cuyo voltaje de salida es proporcional a la carga de entrada. Equipado con sensores piezoeléctricos, puede medir la aceleración, la presión, la fuerza y otras magnitudes mecánicas de los objetos. Se utiliza ampliamente en los sectores de conservación de agua, energía, minería, transporte, construcción, terremotos, aeroespacial, armamento y otros. Este instrumento tiene las siguientes características.
1) La estructura es razonable, el circuito está optimizado, los componentes principales y conectores son importados, con alta precisión, bajo ruido y pequeña deriva, para garantizar la calidad estable y confiable del producto.
2) Al eliminar la entrada de atenuación de la capacitancia equivalente del cable de entrada, se puede extender el cable sin afectar la precisión de la medición.
3) Salida 10VP 50mA.
4) Admite 4, 6, 8, 12 canales (opcional), salida de conexión DB15, voltaje de trabajo: DC12V.

Principio de trabajo
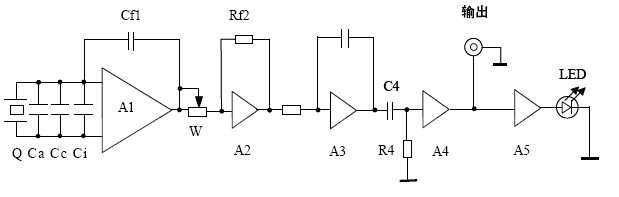
El amplificador de carga CET-DQ601B consta de una etapa de conversión de carga, una etapa adaptativa, un filtro paso bajo, un filtro paso alto, una etapa final de sobrecarga del amplificador de potencia y una fuente de alimentación.
1)Etapa de conversión de carga: con el amplificador operacional A1 como núcleo.
El amplificador de carga CET-DQ601B se puede conectar a sensores piezoeléctricos de aceleración, fuerza y presión. Su característica común es que la magnitud mecánica se transforma en una carga débil (Q), proporcional a ella, y la impedancia de salida (RA) es muy alta. La etapa de conversión de carga convierte la carga en un voltaje (1pc / 1mV), proporcional a la carga, y transforma la alta impedancia de salida en baja.
Ca---La capacitancia del sensor suele ser de varios miles de PF, 1/2 π Raca determina el límite inferior de baja frecuencia del sensor.
Cc-- Capacitancia del cable de salida del sensor de bajo ruido.
Ci--Capacitancia de entrada del amplificador operacional A1, valor típico 3pf.
La etapa de conversión de carga A1 utiliza un amplificador operacional de precisión de banda ancha estadounidense con alta impedancia de entrada, bajo nivel de ruido y baja deriva. El condensador de retroalimentación CF1 tiene cuatro niveles: 101 pf, 102 pf, 103 pf y 104 pf. Según el teorema de Miller, la capacitancia efectiva convertida de la capacitancia de retroalimentación a la entrada es: C = 1 + kcf1. Donde k es la ganancia de lazo abierto de A1, y el valor típico es 120 dB. CF1 es 100 pF (mínimo) y C es aproximadamente 108 pf. Suponiendo que la longitud del cable de entrada de bajo ruido del sensor es de 1000 m, la CC es de 95000 pf; suponiendo que el sensor CA es de 5000 pf, la capacitancia total de caccic en paralelo es de aproximadamente 105 pf. En comparación con C, la capacitancia total es de 105 pf/108 pf = 1/1000. En otras palabras, un sensor con una capacitancia de 5000 pf y un cable de salida de 1000 m, equivalente a la capacitancia de retroalimentación, solo afectará la precisión de CF1 en un 0,1 %. El voltaje de salida de la etapa de conversión de carga es la carga de salida del sensor Q/condensador de retroalimentación CF1, por lo que la precisión del voltaje de salida solo se ve afectada en un 0,1 %.
El voltaje de salida de la etapa de conversión de carga es Q / CF1, por lo que cuando los capacitores de retroalimentación son 101pf, 102pf, 103pf y 104pf, el voltaje de salida es 10mV / PC, 1mV / PC, 0.1mv / pc y 0.01mv / pc respectivamente.
2) Nivel adaptativo
Está compuesto por un amplificador operacional A2 y un potenciómetro de ajuste de la sensibilidad del sensor W. La función de esta etapa es que al utilizar sensores piezoeléctricos con diferentes sensibilidades, todo el instrumento tenga una salida de voltaje normalizada.
3) filtro de paso bajo
El filtro de potencia activo Butterworth de segundo orden con A3 como núcleo tiene las ventajas de menos componentes, ajuste conveniente y banda de paso plana, lo que puede eliminar eficazmente la influencia de las señales de interferencia de alta frecuencia en las señales útiles.
4).Filtro de paso alto
El filtro paso alto pasivo de primer orden compuesto de c4r4 puede suprimir eficazmente la influencia de las señales de interferencia de baja frecuencia en las señales útiles.
5).Amplificador de potencia final
Con A4 como núcleo de ganancia II, protección contra cortocircuitos de salida, alta precisión.
6) Nivel de sobrecarga
Con A5 como núcleo, cuando el voltaje de salida es superior a 10 Vp, el LED rojo del panel frontal parpadea. En este caso, la señal se trunca y distorsiona, por lo que se debe reducir la ganancia o se debe detectar la falla.
Parámetros técnicos
1) Característica de entrada: carga de entrada máxima ± 106Pc
2)Sensibilidad: 0,1-1000mv/PC (- 40 '+ 60dB en LNF)
3) Ajuste de sensibilidad del sensor: el plato giratorio de tres dígitos ajusta la sensibilidad de carga del sensor 1-109,9 piezas/unidad (1)
4)Precisión:
LMV/unidad, lomv/unidad, lomy/unidad, 1000mV/unidad, cuando la capacitancia equivalente del cable de entrada es menor que lonf, 68nf, 22nf, 6.8nf, 2.2nf respectivamente, la condición de referencia de lkhz (2) es menor que ± La condición de trabajo nominal (3) es menor que 1% ± 2%.
5)Filtro y respuesta de frecuencia
a)Filtro paso alto;
La frecuencia límite inferior es de 0,3, 1, 3, 10, 30 y 100 Hz, y la desviación admisible es de 0,3 Hz, - 3 dB _ 1,5 dB; 1,3, 10, 30, 100 Hz, 3 dB ± LDB, pendiente de atenuación: - 6 dB / cot.
b)filtro paso bajo;
Frecuencia límite superior: 1, 3, lo, 30, 100 kHz, BW 6, desviación permitida: 1, 3, lo, 30, 100 kHz-3 dB ± LDB, pendiente de atenuación: 12 dB / Oct.
6) característica de salida
a)Amplitud máxima de salida: ±10 Vp
b)Corriente de salida máxima: ±100 mA
c)Resistencia de carga mínima: 100Q
d)Distorsión armónica: menos del 1% cuando la frecuencia es inferior a 30 kHz y la carga capacitiva es inferior a 47 nF.
7)Ruido:< 5 UV (la ganancia más alta es equivalente a la entrada)
8) Indicación de sobrecarga: el valor pico de salida excede I ±( A 10 + 0,5 FVP, el LED está encendido durante aproximadamente 2 segundos.
9) Tiempo de precalentamiento: unos 30 minutos.
10)Fuente de alimentación: CA 220 V ± 10 %
método de uso
1. La impedancia de entrada del amplificador de carga es muy alta. Para evitar que el cuerpo humano o una tensión de inducción externa dañen el amplificador de entrada, se debe desconectar la alimentación al conectar el sensor a la entrada del amplificador de carga, al retirarlo o si se sospecha que el conector está suelto.
Aunque se puede usar un cable largo, su extensión generará ruido: ruido inherente, movimiento mecánico y ruido de CA inducido por el cable. Por lo tanto, al realizar mediciones in situ, el cable debe ser silencioso y acortarse lo más posible, y debe estar fijo y alejado de equipos eléctricos de gran potencia.
3. La soldadura y el montaje de conectores utilizados en sensores, cables y amplificadores de carga son muy profesionales. De ser necesario, técnicos especializados realizarán la soldadura y el montaje. Para la soldadura, se utilizará fundente de colofonia anhidra y etanol (no se permite el uso de aceite de soldadura). Después de soldar, se debe impregnar una bolita de algodón con alcohol anhidro (no se permite el alcohol medicinal) para limpiar el fundente y el grafito, y luego secar. El conector debe mantenerse limpio y seco con frecuencia, y la tapa de protección debe estar cerrada cuando no se utilice.
4. Para garantizar la precisión del instrumento, se debe precalentarlo durante 15 minutos antes de la medición. Si la humedad supera el 80 %, el precalentamiento debe ser superior a 30 minutos.
5. Respuesta dinámica de la etapa de salida: se refleja principalmente en la capacidad de accionar carga capacitiva, que se calcula mediante la siguiente fórmula: C = I / 2 l. En la fórmula vfmax, C es la capacitancia de carga (f); I es la capacidad de corriente de salida de la etapa de salida (0,05 A); V es la tensión pico de salida (10 Vp); La frecuencia máxima de trabajo de Fmax es de 100 kHz. Por lo tanto, la capacitancia máxima de carga es de 800 PF.
6). Ajuste de la perilla
(1) Sensibilidad del sensor
(2) Ganancia:
(3) Ganancia II (ganancia)
(4) - Límite de baja frecuencia de 3dB
(5) Límite superior de alta frecuencia
(6) Sobrecarga
Cuando el voltaje de salida es superior a 10 Vp, la luz de sobrecarga parpadea para indicar al usuario que la forma de onda está distorsionada. Se debe reducir la ganancia o eliminar la falla.
Selección e instalación de sensores
Como la selección e instalación del sensor tiene un gran impacto en la precisión de la medición del amplificador de carga, a continuación se presenta una breve introducción: 1. Selección del sensor:
(1) Volumen y peso: Debido a la masa adicional del objeto medido, el sensor afectará inevitablemente su estado de movimiento, por lo que la masa ma del sensor debe ser mucho menor que la masa m del objeto medido. En algunos componentes probados, aunque la masa total sea grande, la masa del sensor puede compararse con la masa local de la estructura en algunas partes de la instalación, como en estructuras de paredes delgadas, lo que afectará el estado de movimiento local de la estructura. En este caso, el volumen y el peso del sensor deben ser lo más pequeños posible.
(2) Frecuencia de resonancia de instalación: si la frecuencia de la señal medida es f, se requiere que la frecuencia de resonancia de instalación sea mayor a 5F, mientras que la respuesta de frecuencia dada en el manual del sensor es del 10%, que es aproximadamente 1/3 de la frecuencia de resonancia de instalación.
(3) Sensibilidad de carga: cuanto mayor sea, mejor, lo que puede reducir la ganancia del amplificador de carga, mejorar la relación señal-ruido y reducir la deriva.
2),Instalación de sensores
(1) La superficie de contacto entre el sensor y la pieza probada debe ser limpia y lisa, y la irregularidad debe ser inferior a 0,01 mm. El eje del orificio del tornillo de montaje debe ser consistente con la dirección de prueba. Si la superficie de montaje es rugosa o la frecuencia medida supera los 4 kHz, se puede aplicar un poco de grasa de silicona limpia en la superficie de contacto para mejorar el acoplamiento de alta frecuencia. Al medir el impacto, debido a que el pulso de impacto tiene una gran energía transitoria, la conexión entre el sensor y la estructura debe ser muy confiable. Es mejor usar pernos de acero, y el par de instalación es de aproximadamente 20 kg. Cm. La longitud del perno debe ser apropiada: si es demasiado corto, la resistencia no es suficiente, y si es demasiado largo, puede quedar espacio entre el sensor y la estructura, se reducirá la rigidez y la frecuencia de resonancia. El perno no debe atornillarse demasiado en el sensor, de lo contrario, el plano de la base se doblará y la sensibilidad se verá afectada.
(2) Se debe utilizar una junta aislante o un bloque de conversión entre el sensor y la pieza probada. La frecuencia de resonancia de la junta y el bloque de conversión es mucho mayor que la frecuencia de vibración de la estructura; de lo contrario, se añadirá una nueva frecuencia de resonancia a la estructura.
(3) El eje sensible del sensor debe ser consistente con la dirección de movimiento de la pieza probada, de lo contrario, la sensibilidad axial disminuirá y la sensibilidad transversal aumentará.
(4) La vibración del cable provocará un contacto deficiente y ruido de fricción, por lo que la dirección de salida del sensor debe ser a lo largo de la dirección de movimiento mínimo del objeto.
(5) Conexión de perno de acero: buena respuesta de frecuencia, la frecuencia de resonancia de instalación más alta, puede transferir una gran aceleración.
(6) Conexión de perno aislada: el sensor está aislado del componente a medir, lo que puede prevenir eficazmente la influencia del campo eléctrico de tierra en la medición.
(7) Conexión de la base de montaje magnética: la base de montaje magnética se puede dividir en dos tipos: aislamiento a tierra y sin aislamiento a tierra, pero no es adecuada cuando la aceleración supera los 200 g y la temperatura supera los 180.
(8) Unión de capa fina de cera: este método es simple, tiene buena respuesta de frecuencia, pero no es resistente a altas temperaturas.
(9) Conexión del perno de unión: El perno se une primero a la estructura a probar y luego se atornilla el sensor. La ventaja es que no daña la estructura.
(10) Aglutinantes comunes: resina epoxi, agua de caucho, pegamento 502, etc.
Accesorios del instrumento y documentos adjuntos
1) Una línea de alimentación de CA
2) Un manual de usuario
3) 1 copia de los datos de verificación
4) Una copia de la lista de empaque
7. Soporte técnico
Comuníquese con nosotros si ocurre alguna falla durante la instalación, el funcionamiento o el período de garantía que el ingeniero eléctrico no pueda solucionar.
Nota: El antiguo número de pieza CET-7701B dejará de usarse hasta fines de 2021 (31 de diciembre de 2021), a partir del 1 de enero de 2022, lo cambiaremos al nuevo número de pieza CET-DQ601B.
Enviko se especializa en sistemas de pesaje en movimiento desde hace más de 10 años. Nuestros sensores WIM y otros productos gozan de un amplio reconocimiento en la industria ITS.




