
En primer lugar, la composición del sistema
1. El sistema de detección continua de sobrecarga de la carretera generalmente se compone del sistema forense y de recopilación de información de sobrecarga del vehículo de carga de la parte delantera y del sistema de gestión de información de sobrecarga del vehículo de carga de la parte trasera.
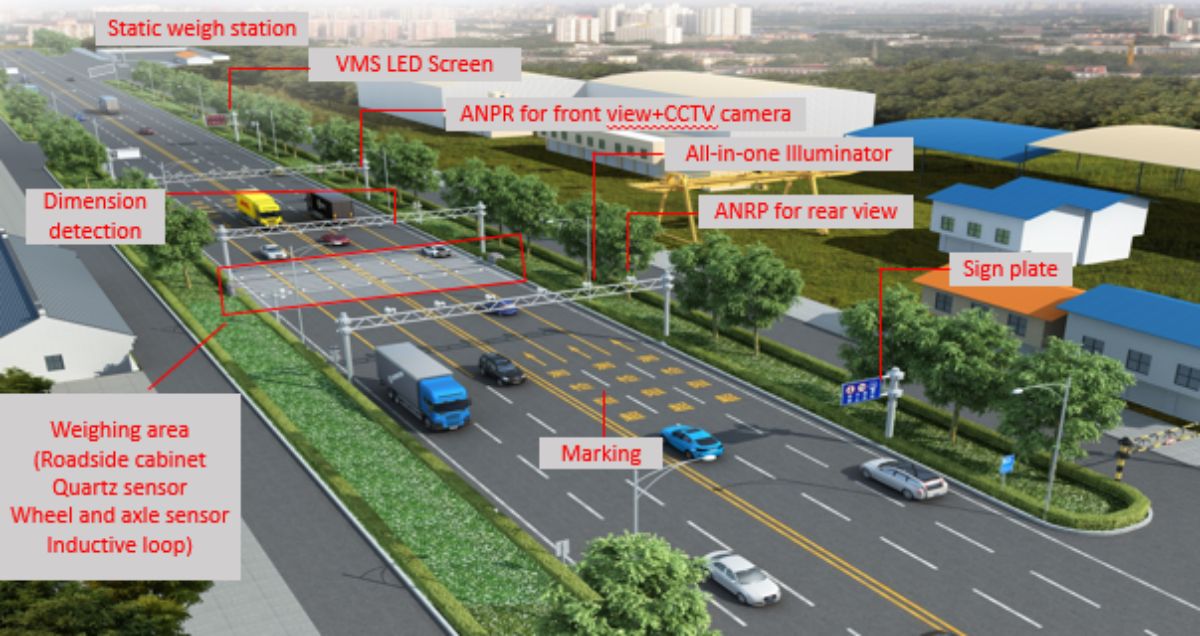
2. El sistema de recopilación de información y análisis forense de sobrecarga de vehículos de carga frontal generalmente se compone de equipo de pesaje continuo, equipo de detección del tamaño del perfil del vehículo, equipo de reconocimiento y captura de matrículas, detector de vehículos, equipo de videovigilancia, equipo de divulgación de información, señales de tráfico, instalaciones de suministro de energía y protección contra rayos, gabinetes de control in situ, equipo de recopilación y procesamiento de información y transmisión de red, área de pesaje y detección continuos, señalización de señales de tráfico e instalaciones de apoyo relacionadas.
3. La plataforma de gestión de información de sobrecarga de vehículos de carga de back-end (incluida la aplicación directa) generalmente está compuesta por plataformas de gestión de información de sobrecarga de condado (distrito), municipio y provincia (incluida la aplicación directa).
2. Requisitos funcionales
1. Requisitos funcionales para equipos de pesaje continuo
1.1 Rango de velocidad de funcionamiento
El rango de velocidad del equipo de pesaje continuo es de (0,5~100) km/h para que los vehículos de carga pasen por el área de detección continua.
1.2 Nivel de precisión del peso total del vehículo
(1) El error máximo permitido en el pesaje del peso total del vehículo y la carga dentro del rango de velocidad de operación permitida del equipo de pesaje continuo no debe ser inferior a las disposiciones y requisitos del nivel de precisión 5 y 10 en el JJG 907 "Reglamento de verificación de aparatos de pesaje automáticos para vehículos de carretera dinámicos" (Tabla 2-1).
Tabla 2-1 Error máximo permitido del pesaje dinámico del peso total del vehículo
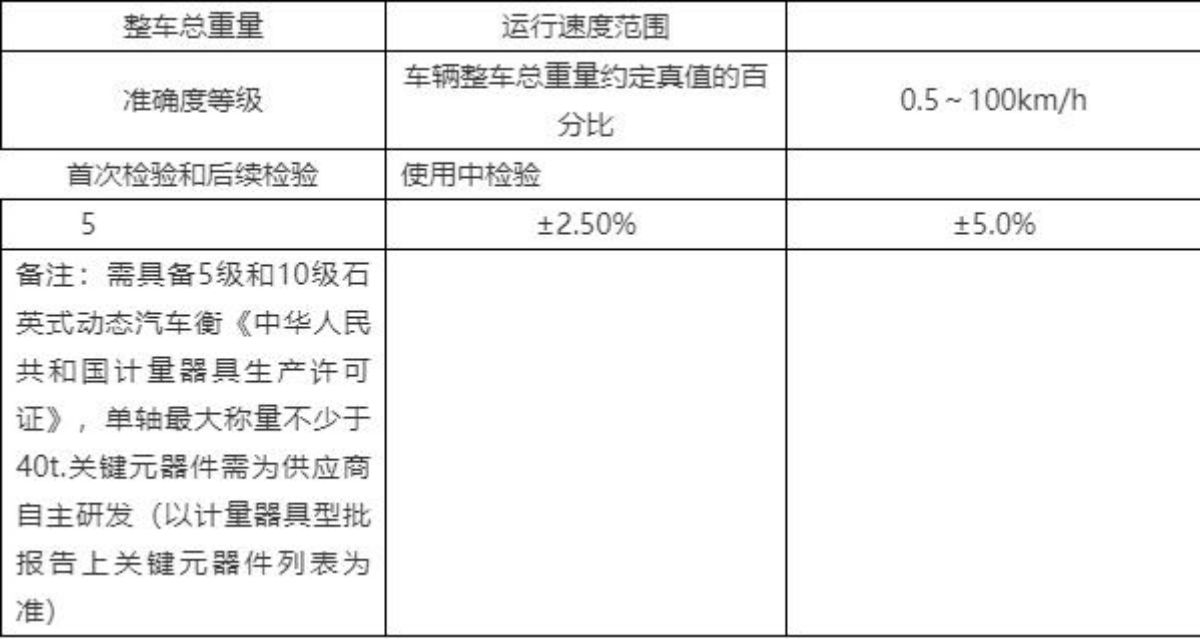
(2) Cuando el vehículo de carga pase por el área de detección de pesaje continuo con comportamientos de conducción anormales, como aceleraciones y desaceleraciones frecuentes, saltos de báscula, paradas, curvas en S, cruces, líneas de presión, marcha atrás o paradas y arranques en un corto período de tiempo, la precisión del peso total del vehículo del equipo de pesaje continuo no deberá ser inferior a las disposiciones y requisitos de la Tabla 2-1. (Es importante mantener la presión sobre los carriles y conducir en sentido contrario).
1.3 La celda de carga utilizada en el equipo de pesaje continuo deberá cumplir con las disposiciones y requisitos de GB/T7551 "Célula de carga", la vida útil deberá ser ≥ 50 millones de ejes y el nivel de protección de la celda de carga utilizada en el pesaje continuo no deberá ser inferior a IP68. 。
1.4 El tiempo promedio de funcionamiento sin problemas de un equipo de pesaje continuo no debe ser inferior a 4000 h, y el período de garantía de los componentes clave no debe ser inferior a 2 años, y la vida útil no debe ser inferior a 5 años.
1.5 Requisitos de protección contra apagado
(1) Cuando se apaga la alimentación, el equipo de pesaje continuo debe poder almacenar automáticamente los parámetros y la información de pesaje configurados actualmente, y el tiempo de almacenamiento no debe ser inferior a 72 h.
(2) En caso de corte de energía, el tiempo de funcionamiento del reloj interno del equipo de pesaje continuo no debe ser inferior a 72d.
1.6 Requisitos del tratamiento anticorrosión
Las partes metálicas expuestas de los equipos de pesaje continuo deben tratarse con un tratamiento anticorrosión de acuerdo con las disposiciones pertinentes de GB/T18226 "Condiciones técnicas para la anticorrosión de componentes de acero en la ingeniería de tráfico en carreteras".
1.7 El error de medición de velocidad del detector de vehículos del equipo de pesaje continuo debe ser ≤± 1 km/h, y la precisión de la detección del flujo de tráfico debe ser ≥99%.
1.8 Los requisitos técnicos de los separadores de vehículos para equipos de pesaje continuo son los siguientes:
(1) La precisión de detección del número de ejes debe ser ≥98%.
(2) El error de detección del espaciado del eje debe ser ≤± 10 cm.
(3) La precisión de la clasificación del vehículo debe ser ≥ 95%.
(4) La tasa de reconocimiento entre canales debe ser ≥98%.
1.9 El rango aplicable de temperatura del entorno de trabajo debe ser de -20 °C a +80 °C, y los indicadores técnicos de resistencia a la humedad ambiental deben cumplir con las regulaciones y requisitos pertinentes de los equipos mecánicos y eléctricos para exteriores de JT/T817 "Requisitos técnicos generales y métodos de prueba para equipos de sistemas electromecánicos de carreteras".
1.10 Se deben tomar medidas a prueba de lluvia y polvo, y el nivel de protección debe cumplir con las disposiciones y requisitos de JT/T817.

2. Requisitos funcionales para equipos de prueba del tamaño del perfil del vehículo
2.1 Cuando el vehículo de carga pase por el área de detección de pesaje continuo a una velocidad de (0,5 a 100) km/h, deberá ser capaz de realizar automáticamente la detección rápida en tiempo real de las dimensiones geométricas y el modelo 3D de longitud, anchura y altura del vehículo, y generar los resultados de identificación correctos. El tiempo de respuesta no deberá ser inferior a 30 ms, y el tiempo para completar una detección y generar un resultado no deberá ser superior a 5 s.
2.2 El rango de medición geométrica de la longitud, ancho y altura del vehículo de carga deberá cumplir los requisitos de la Tabla 2-2.
Tabla 2-2 Rango de medición del equipo de prueba del tamaño del perfil del vehículo
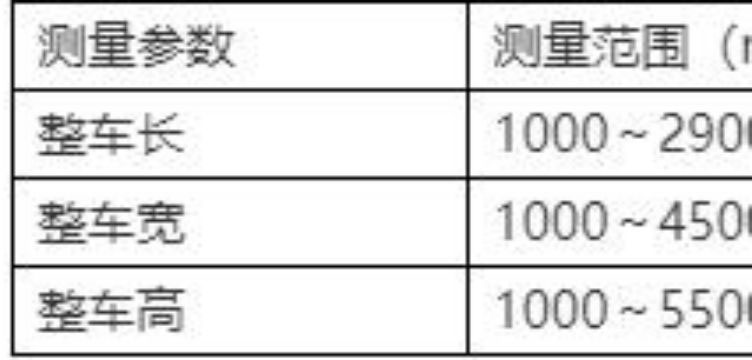
2.3 La resolución de la medición de la dimensión geométrica de la longitud, el ancho y la altura del vehículo de carga no es más de 1 mm, y el error de medición del equipo de detección del tamaño del contorno del vehículo debe cumplir con los siguientes requisitos dentro del rango de 1 ~ 100 km / velocidad de operación normal: (en términos de velocidad de carrera, debe ser consistente con los requisitos del equipo de pesaje dinámico anterior).
(1) Error de longitud ≤ ± 500 mm;
(2) Error de ancho ≤ ± 100 mm;
(3) El error de altura ≤± 50 mm.
2.4 La frecuencia de detección del punto láser del equipo de prueba del tamaño del perfil del vehículo debe ser ≥1 kHz y debe tener 9 tipos de modelos de vehículos y funciones de detección de velocidad del vehículo especificadas en el vehículo motorizado GB1589 "Tamaño del contorno, carga por eje y límites de calidad de automóviles, remolques y trenes de automóviles".
2.5 Debe tener las funciones de vehículos de carga paralelos, evaluación del estado de conducción en curvas en S, blindaje de material negro y detección del tamaño geométrico del perfil del vehículo de carga de material de alta reflectividad.
2.6 Debe contar con la clasificación de modelos de vehículos de carga, volumen de tráfico, velocidad de ubicación, distancia al frente, porcentaje de vehículos seguidos, distancia al frente y funciones de detección de ocupación. La precisión de la clasificación de los modelos de vehículos de carga debe ser ≥ 95%.
2.7 El rango aplicable de temperatura del entorno de trabajo debe ser de -20 °C a +55 °C, y los indicadores técnicos de resistencia a la humedad ambiental deben cumplir con las regulaciones y requisitos pertinentes de los equipos mecánicos y eléctricos para exteriores de JT/T817 "Requisitos técnicos generales y métodos de prueba para equipos de sistemas electromecánicos de carreteras".
2.8 El equipo de prueba del tamaño del perfil del vehículo con láser debe instalarse con un pórtico con un canal de mantenimiento
2.9 El nivel de protección del equipo de prueba del tamaño del perfil del vehículo no deberá ser inferior a IP67.
3. Requisitos funcionales para equipos de reconocimiento y captura de matrículas
3.1 Los requisitos funcionales de los equipos de reconocimiento y captura de matrículas deberán cumplir las disposiciones y requisitos pertinentes de GB/T 28649 "Sistema de identificación automática de matrículas de vehículos de motor".
3.2 El equipo de reconocimiento y captura de matrículas deberá estar equipado con una luz de relleno o luz intermitente, que deberá ser capaz de capturar claramente el número del vehículo que pasa por el área de detección de pesaje continuo bajo cualquier condición climática y emitir el resultado de identificación correcto.
3.3 El equipo de reconocimiento y captura de matrículas debe tener una precisión de reconocimiento de matrículas ≥ 99% durante el día y una precisión de reconocimiento de matrículas ≥ 95% durante la noche, y el tiempo de reconocimiento no debe ser más de 300 ms.
3.4 La imagen de la matrícula del vehículo de carga recolectada debe generarse claramente en formato JPG de ancho completo, y el resultado del reconocimiento debe incluir el tiempo de reconocimiento, el color de la matrícula, etc.
3.5 Los píxeles de la imagen de captura de reconocimiento de matrículas no deben ser inferiores a 5 millones, otros píxeles de imágenes de captura no deben ser inferiores a 3 millones, los vehículos de carga a través del área de detección de pesaje continuo, deben capturar el frente del vehículo, dos lados del vehículo y la parte trasera del vehículo un total de no menos de 4 imágenes de alta definición.
3.6 De acuerdo con la información de la imagen de alta definición frontal, el área de la matrícula del vehículo de carga, las características delanteras y de la cabina, el color frontal, etc., deben poder distinguir claramente el número de ejes, el color de la carrocería y la situación básica de las mercancías transportadas de acuerdo con la información de la imagen de alta definición en el costado del vehículo; de acuerdo con la información de la imagen de alta definición de la parte trasera del vehículo, se puede distinguir el número de matrícula de la cola, el color de la carrocería y otra información.
3.7 Cada imagen debe estar superpuesta con información como la fecha de detección, la hora de la prueba, la ubicación de la prueba, el peso total del vehículo y la carga, las dimensiones del vehículo, el número de equipo forense de imágenes, la información contra la falsificación y otra información.
3.8 El ancho de banda del canal de transmisión de información de la imagen capturada no será inferior a 10 Mbps.
3.9 Debe tener funciones de autocomprobación de fallas, como comunicación anormal y falla de energía.
3.10 El rango aplicable de temperatura del entorno de trabajo debe ser de -20 °C a +55 °C, y los indicadores técnicos de resistencia a la humedad ambiental deben cumplir con las regulaciones y requisitos pertinentes de los equipos mecánicos y eléctricos para exteriores de JT/T817 "Requisitos técnicos generales y métodos de prueba para equipos de sistemas electromecánicos de carreteras".
3.11 El nivel de protección de los equipos de reconocimiento y captura de matrículas no será inferior a IP67.
4 Requisitos funcionales del equipo de videovigilancia
4.1 La cámara de videovigilancia debe tener una función de cámara infrarroja de día y de noche, y debe ser capaz de detectar el área de pesaje sin interrupción con la función de cámara panorámica, y guardar no menos de 10 segundos de datos de video de recopilación de evidencia de sobrecarga de vehículos de carga ilegal.
4.2 Debe tener las funciones de autodiagnóstico, calibración del campo de visión y compensación automática.
4.3 Las imágenes de vídeo forense no deben tener menos de 3 millones de píxeles y deben ser claras y estables.
4.4 Debe tener la función de rotación y zoom, y la rotación horizontal y vertical y el zoom de la lente se pueden realizar de acuerdo con el comando de control.
4.5 Debe tener la función de limpiar y quitar los faros antiniebla antilluvia y antihielo, y debe poder limpiar, calentar y descongelar la cubierta protectora a tiempo.
4.6 Las imágenes de video forenses deben transmitirse a la plataforma de gestión de información de sobrecarga y de aplicación directa del nivel de condado (ciudad) en tiempo real.
4.7 Los equipos de videovigilancia y demás indicadores técnicos de sus accesorios deberán cumplir las disposiciones y requisitos pertinentes de GA/T995.
4.8 El rango aplicable de temperatura del entorno de trabajo debe ser de -20 °C a +55 °C, y los indicadores técnicos de resistencia a la humedad ambiental deben cumplir con las regulaciones y requisitos pertinentes de los equipos mecánicos y eléctricos para exteriores de JT/T817 "Requisitos técnicos generales y métodos de prueba para equipos de sistemas electromecánicos de carreteras".
5 Requisitos funcionales para equipos de publicación de información
5.1 Debería ser posible proporcionar información en tiempo real sobre la sobrecarga del vehículo al conductor del vehículo ilegal sobrecargado.
5.2 Debe poder publicar y mostrar información como alternancia de texto y desplazamiento.
5.3 Los principales indicadores funcionales e indicadores técnicos de las señales LED de información variable para carreteras deberán cumplir las disposiciones y requisitos pertinentes de GB/T23828 "Señales LED de información variable para carreteras".
5.4 Pantalla LED de información variable tipo pórtico de doble columna para carreteras. El espaciado de píxeles habitual es de 10 mm, 16 mm y 25 mm. El área de visualización para cuatro y seis carriles puede ser de 10 y 14 metros cuadrados, respectivamente. El formato del contenido puede ser de una fila y 14 columnas.
5.5 El espaciado de píxeles de la pantalla LED de información variable de una sola columna para carreteras se puede seleccionar entre 10 mm, 16 mm y 25 mm. El tamaño de la pantalla puede seleccionarse entre 6 y 11 metros cuadrados. El formato del contenido puede ser de 4 filas y 9 columnas.
5.6 El diseño y la configuración de las señales de información variable LED para carreteras y la distancia de reconocimiento visual deben considerar plenamente la velocidad real y las necesidades de reconocimiento visual de los vehículos de carga en la sección de la carretera, y cumplir con las disposiciones y requisitos pertinentes de GB/T23828 "Señales de información variable LED para carreteras".
6 Requisitos de instalación de señales de tráfico
6.1 Colocar una señal de tránsito para ingresar al “área de pesaje y detección continua” a una distancia no menor a 200 metros frente al área de detección de pesaje continua.
6.2 Colocar una señal de tránsito de “prohibido cambiar de carril” a no menos de 150 metros frente al área de detección de pesaje continuo.
6.3 Colocar una señal de tránsito de “Levantar prohibición de cambio de carril” a una distancia no menor de 200 metros detrás del área de detección de pesaje continuo.
6.4 La colocación de señales de tráfico en el área de detección de pesaje continuo deberá cumplir con el diseño y los requisitos de GB5768 "Señales y marcas de tráfico vial".
7. Requisitos para equipos de alimentación eléctrica y puesta a tierra de protección contra rayos
7.1 El sistema de recopilación de información forense y de sobrecarga deberá estar equipado con líneas de suministro de energía estables y confiables, que deberán ser capaces de cumplir con los requisitos de funcionamiento de suministro de energía ininterrumpido las 24 horas.
7.2 Se deben tomar las medidas de protección necesarias contra rayos y sobretensiones para la interfaz de suministro de energía y la interfaz de control del sistema de recopilación de información de sobrecarga y análisis forense y los componentes relacionados, y las medidas de protección deben cumplir con las disposiciones y requisitos pertinentes de JT/T817 "Requisitos técnicos generales y métodos de prueba para equipos de sistemas electromecánicos de carreteras".
7.3 El sistema de recopilación de información de sobrecarga y de análisis forense debe adoptar un método de conexión a tierra de punto único cercano, y se debe adoptar el método de conexión a tierra en paralelo de CC.
7.4 La protección contra rayos y la resistencia eléctrica del equipo de recopilación de información de sobrecarga y del equipo forense deberán ser ≤ 10 Ω, y la resistencia de puesta a tierra de protección deberá ser ≤ 4 Ω.
8 Requisitos funcionales del armario de control de campo

8.1 El gabinete de control in situ, configurado con el sistema de recopilación de información de sobrecarga y análisis forense, debe ser capaz de almacenar procesadores de adquisición de datos, detectores de vehículos, conmutadores de red y otros equipos. Debe ser capaz de cargar la información de sobrecarga de camiones a la Plataforma de Control Directo Administrativo Integral de Tráfico del Centro de Información del Departamento Provincial de Transporte y de transmitirla en tiempo real a la señal LED de información variable de la carretera para su publicación y visualización.
8.2 El gabinete de control deberá estar diseñado con un sello de chasis de doble capa, que pueda prevenir eficazmente el polvo y la lluvia, y tenga un sistema de control de temperatura independiente.
8.3 El gabinete de control debe estar diseñado con ranuras para facilitar la expansión de funciones.
8.4 El gabinete de control deberá estar equipado con equipos de protección de seguridad de datos para evitar fugas de datos de detección de exceso de límite.
9. Requisitos para la instalación de zonas de pesaje continuo para sobrecargas en autopistas
9.1 El área de detección de pesaje continuo está compuesta por el portador del equipo de pesaje continuo (sensor de cristal de cuarzo) y sus secciones de guía en los extremos delantero y trasero (de acuerdo con la superficie de la carretera endurecida de 30 metros al frente y 15 metros en la parte trasera) (Figura 2-1).

Figura 2-1 Diagrama esquemático del área de pesaje continuo
9.2 La ubicación del área de pesaje y prueba continua no debe ser plana, con un radio de curva longitudinal pequeño, poca visibilidad ni en tramos de bajada largos y otros tramos de carretera. Los indicadores lineales deben cumplir con la norma ASTM E1318 "Especificación estándar para sistemas de pesaje en movimiento (WIM) en carreteras con requisitos de usuario y métodos de prueba". Los requisitos específicos son los siguientes:
(1) El radio de giro de la línea central de la carretera de la sección guía de 60 m y la sección guía trasera de la carretera de 30 m en el área de detección de pesaje continuo debe ser ≥ 1,7 km.
(2) La pendiente longitudinal de la superficie de la carretera en la sección de guía delantera de 60 m y la sección de guía trasera de 30 m en el área de detección de pesaje continuo debe ser ≤2 %.
(3) El valor de la pendiente transversal del pavimento i de la sección de la carretera guía delantera de 60 m y de la sección de la carretera guía trasera de 30 m del área de detección de pesaje continuo debe cumplir con 1 % ≤ i ≤ 2 %.
(4) No debe haber ningún obstáculo que bloquee la línea de visión del conductor dentro de la sección de carretera guía de 150 m antes del área de detección de pesaje continuo.
(5) La distancia entre el lugar de ubicación del área de pesaje y detección continua y la entrada y salida del túnel de la carretera en el mismo tramo de carretera no deberá ser inferior a 2 km ni inferior a 1 km.
(6) El error horizontal de la conexión entre el sensor y la superficie de la carretera no es superior a 0,1 mm.
9.3 Para garantizar la precisión de los datos de pesaje continuo y la seguridad en la conducción, el aislamiento del carril de la sección de la carretera guía delantera de 60 m y la sección de la carretera guía trasera de 30 m del área de detección de pesaje continuo deben estar aislados mediante una línea continua.
9.4 Zona de pesaje y pruebas continuas para guiar la construcción de tramos de carretera
(1) La plataforma de la sección de la carretera guía debe ser estable y el coeficiente de fricción del pavimento debe cumplir con los requisitos de diseño de la sección de la carretera.
(2) La superficie del pavimento de la sección de la carretera guía debe ser lisa y compacta. El pavimento asfáltico no debe presentar surcos, baches, hundimientos, congestiones, grietas, fisuras en la red ni protuberancias. El pavimento de cemento no debe presentar desniveles, placas rotas, hundimientos, acumulación de lodo ni otras alteraciones. La planitud del pavimento de hormigón de cemento y del pavimento de hormigón asfáltico debe cumplir con las disposiciones y requisitos pertinentes de la norma JTGF80-1 "Normas de Inspección y Evaluación de la Calidad de la Ingeniería de Carreteras".
(3) El ancho de la superficie de la carretera de la sección de la carretera guía debe ser capaz de soportar el paso normal del vehículo de carga más ancho dentro del rango de pesaje.
(4) La línea central del pavimento en el área de pesaje y prueba continua debe estar aislada con líneas continuas dobles amarillas (amarilla simple), y la línea de demarcación del carril debe estar aislada con líneas continuas blancas.
3. Requisitos de protocolo de interfaz y formato de datos
El protocolo de interfaz y el formato de datos del sistema de detección continua de sobrecarga de carreteras deben cumplir con las disposiciones y requisitos pertinentes del "Plan de diseño de ingeniería de aplicación directa administrativa integral de tráfico de Fujian" para garantizar la interconexión y el intercambio de información entre las plataformas de gestión de información de sobrecarga (incluida la aplicación directa) del condado (distrito), municipio y provincia.

Enviko Technology Co., Ltd.
E-mail: info@enviko-tech.com
https://www.envikotech.com
Oficina de Chengdu: N.° 2004, Unidad 1, Edificio 2, N.° 158, Calle Tianfu 4, Zona de Alta Tecnología, Chengdu
Oficina de Hong Kong: 8F, Edificio Cheung Wang, 251 San Wui Street, Hong Kong
Fábrica: Edificio 36, Zona Industrial de Jinjialin, ciudad de Mianyang, provincia de Sichuan
Hora de publicación: 25 de enero de 2024




